Az MSK Finland a Visual Components robot offline programozási (OLP) és gyártás szimulációs szoftverének segítségével növeli a hatékonyságot mind a robotcellák automatizálásában, mind az intralogisztikai tervezésben. A robotprogramok offline elkészítésével és validálásával az MSK felére csökkenti a programozási időt, elkerüli a termelés leállását és javítja a programok minőségét, különösen a többrobotos cellákban. A vállalat gyárszimulációt használ a mobil robotok intralogisztikai alkalmasságának értékeléséhez, digitális környezetben elemezve az termékáramlást, az útvonalakat és a kihasználtsági arányokat. Ezek az eszközök együttesen segítik a vállalatot a sorozatgyártás magas szintű automatizálásának fenntartásában és a jövőbeli beruházásokra való felkészülésben.
Nagy volumenű gyártó, amely több gyártási folyamatban is robotikát alkalmaz
Az MSK Finland mezőgazdasági és logisztikai gépekhez gyárt biztonsági kabinokat, évente körülbelül 14 000 kabint 60 000 négyzetméteres üzemeiben, körülbelül 200 alkalmazottal. A vállalat a koncepciótervezéstől a sorozatgyártásig az egész folyamatot kezeli. Termékeik mérete és összetettsége miatt az automatizálás már az 1990-es évek eleje óta elengedhetetlen, amikor az MSK először alkalmazott ipari robotokat. Ma a gyár ABB, Yaskawa és Universal Robots robotokat használ hegesztéshez, csiszoláshoz, festéshez, csőkezeléshez és különböző anyagmozgatási alkalmazásokhoz. A magas automatizáltsági szint fenntartása stratégiai követelmény az MSK számára, hogy versenyképes maradjon a nagy volumenű gyártás költségérzékeny piacán.
A lassú robotprogramozás és a munkaigényes logisztika korlátozta az általános teljesítményt
Az MSK két jelentős kihívással szembesült, amelyek hatással voltak a termelékenységre. Az első a teach pendant használatával történő robotprogramozáshoz szükséges idő és erőfeszítés volt. A roboton történő közvetlen programozás gyakran a gyártás leállását jelentette, ami késedelmet okozott és lekötötte az erőforrásokat. A probléma még hangsúlyosabbá vált komplex beállítások esetén, különösen az ABB MultiMove többrobotos cellákban, ahol több robotnak szinkronizált mozgással kell működnie, és a hagyományos teach pendant-tal programozás lassú és bonyolulttá válik. Az új cellák üzembe helyezése szintén jelentős helyszíni munkát igényelt, és csak a fizikai berendezések telepítése után kezdődhetett meg.
A második kihívás a belső logisztika volt. A gyár naponta több ezer csomagot kezel, beleértve a sárvédőket, a raklapokat, a festett alkatrészeket, a részösszeállításokat és az upstream folyamatokba visszakerülő üres szállítóeszközöket. A szállítás nagy része kézzel, targoncákkal történt. A gyártási volumen növekedésével az MSK meg akarta érteni, mely szállításokat lehetne automatizálni mobil robotok, például AGV-k vagy AMR-ek segítségével a hatékonyság javítása érdekében, és hogy a meglévő gyár layout-ja és biztonsági korlátai támogatják-e a mobil robotok működését. A vállalatnak adat alapú módszerre volt szüksége, hogy a gyártás megszakítása nélkül tudja értékelni az intralogisztikai automatizálást.
A Visual Components OLP és a szimuláció integrálása az automatizálás virtuális tervezéséhez, teszteléséhez és validálásához
Forrás: Visual Components
Ezeknek a kihívásoknak a megoldására az MSK a Visual Components robot offline programozási és gyártási szimulációs eszközeit alkalmazta. A Visual Components OLP szoftver segítségével a csapat a robotcella helyett számítógépen hozza létre és ellenőrzi a robotprogramokat. Ez lehetővé teszi a programozási munkák elvégzését a gyártás normál működése mellett. A virtuális környezet segít az MSK-nak ellenőrizni a robotok elérhetőségét, validálni a jig-ek és rögzítők tervezését, eltávolítani a pályáról a felesleges pontokat és tesztelni az ütközésmentes mozgásokat. A tipikus programozási idő körülbelül 50%-kal csökkent a teach pendant használatához képest, a robotcella összetettségétől függően.

Az MSK jelenleg a Visual Components OLP segítségével számos robotrendszert programoz offline módon különböző ipari folyamatokhoz. Pédául a 3 tengelyes portállal és 2 tengelyes munkadarab-pozicionálóval felszerelt Yaskawa FMS hegesztőcella, az ABB MultiMove hegesztőállomások, ahol egy robot két hegesztőrobot szerszámkezelőjeként működik, valamint egy, két külön vezérlővel működő ABB robotokkal felszerelt csiszolócella. Ezek közül több robotcellát teljes egészében offline módon terveztek és programoztak, mielőtt a fizikai cellákat összeszerelték, ami lerövidítette az üzembe helyezés idejét és javította a robotprogramok minőségét.
„A többrobotos cellák programozása sokkal nehezebb, mint az egyszerű celláké. A Visual Components OLP segítségével a programozás általában egy hétig tart. A Visual Components használatával sokkal hatékonyabb a programozás, mert ellenőrizni lehet a mozgásokat és törölni a felesleges pontokat.” – mondta Joni Ketola, az MSK Finnország gyártásfejlesztési mérnöke.

A Visual Components OLP hatékonyabbá tette a varratkeresési programozást is, mivel a mozgások a szimulációs környezetben definiálhatók és tesztelhetők, mielőtt a valódi roboton finomhangolásra kerülnének. Az MSK csapata jelenleg azt vizsgálja, hogyan lehetne a hegesztési adatokat közvetlenül a CAD-modellekből importálni, hogy a programozási munkafolyamat még több lépését automatizálhassák.
Az MSK szélesebb körű automatizálási stratégiájának részeként a Visual Components gyártás szimulációját használta az intralogisztikai automatizálás tanulmányozására. A gyár alaprajzai, gyártási adatai és valós anyagáramlásai alapján részletes 3D-modell készült. A szimuláció tartalmazza érkező oldalról kapott sárvédőállványok, festett alkatrészek, üres raklapok, alkatrészek és raklapra rakott anyagok mozgását.

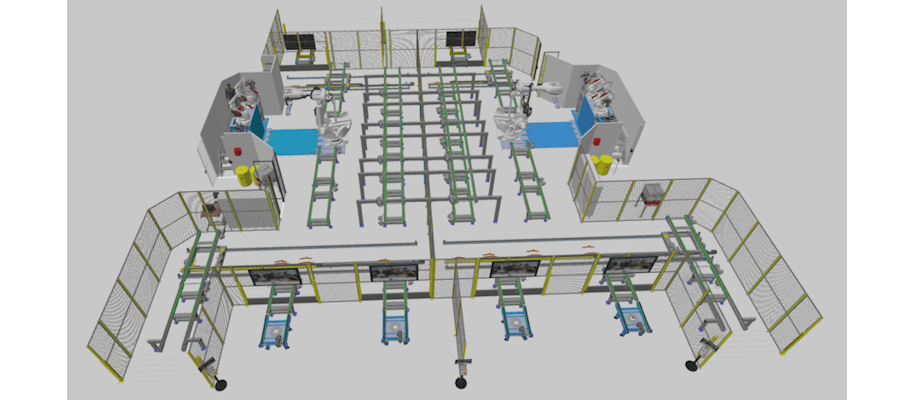
MSK Finnország gyár layout-ja a Visual Components szimulációs szoftverben

Anyagáramlási gráf a folyamatáramlás modellezéséhez a Visual Components programban
„A Visual Components rendelkezik egy kész termékkatalógussal, amely gyárterületek modellezésére alkalmas alkatrészeket tartalmaz. Lehetővé teszi továbbá a különböző alkatrészek statikájának részletes vizsgálatát is.” – mondta Joni Ketola, az MSK Finnország gyártásfejlesztési mérnöke.
Minden szállítási feladatot reális gyakorisággal, útvonalakkal és időzítéssel modelleztek, és az AGV viselkedését tipikus gyártói adatok, például 1,5 m/s átlagos haladási sebesség alapján szimulálták. A szimuláció segített meghatározni a biztonságos haladási útvonalakat, a pufferzónákat és az ember által működtetett targoncákkal való interakciókat.

Mobil robotok kihasználtsági aránya 8 órás időszakban, Visual Components szoftverrel szimulálva
Az eredmények azt mutatták, hogy egy rakodó típusú AGV 68%-os kihasználtsági arányt tudott elérni egy nyolcórás műszak alatt a vizsgált feladatok elvégzése során, ami megerősítette, hogy a mobil robotok hatékonyan használhatók az MSK meglévő gyárterületén.
Gyorsabb üzembe helyezés, jobb programminőség és adatközpontú megközelítés a logisztikai automatizáláshoz
A Visual Components szoftver integrálása az MSK munkafolyamatába egyértelmű előnyöket hozott a teljes gyártási folyamatban. A robotprogramozás terén az OLP gyorsabb és következetesebb robotprogram-fejlesztést tett lehetővé, jelentősen csökkentve a gyártóüzemben eltöltött időt. Mivel a robotprogramok offline készülnek és kerülnek tesztelésre, a gyártást már nem kell a programozási munkák miatt szüneteltetni. A robotok mozgása hatékonyabb, a felesleges mozdulatok kiküszöbölhetők, és az ütközésveszélyek már a virtuális modellben korán felismerhetők és kiküszöbölhetők. Az új cellák megérkezése előtt elvégezhető programkészítés lerövidítette az üzembe helyezés idejét és javította az első alkalommal elért siker arányát.
„A Visual Components használatának előnye, hogy az irodában programozhatjuk a robotokat, miközben azok a gyártásban dolgoznak. Tapasztalatom szerint a Visual Components OLP segítségével 50%-kal gyorsabb a programozás, mint a tanítóegységgel. Új robotcellák esetében még a robotcella tényleges elkészülte előtt elkészíthetjük a programokat.” – mondta Joni Ketola, MSK Finnország gyártásfejlesztési mérnöke.
Az intralogisztika területén a gyártás szimuláció megbízható módszert biztosított az MSK számára a mobil robotok teljesítményének értékeléséhez a gyártás megzavarása nélkül. A vállalat most már pontosan tudja, mely anyagmozgatások alkalmasak leginkább az automatizálásra, és hogyan integrálhatók az AGV-k vagy AMR-ek a folyamatokba. A digitális modell emellett egy platformot is biztosít az MSK számára a jövőbeli forgatókönyvek teszteléséhez, például a mobil robotflotta bővítéséhez, az elrendezés módosításához vagy a robotok ERP- és MES-rendszerekbe történő integrálásához. Ez támogatja a vállalat átfogóbb stratégiáját, amelynek célja az automatizálás növelése nemcsak a robotcellákban, hanem az egész gyártási folyamatban.
Skálázható digitális alap a jövőbeli automatizálási beruházásokhoz
A robotok offline programozásának és a gyári szimulációnak a kombinálásával az MSK egy skálázható digitális alapot hozott létre, amely mind a jelenlegi gyártási igényeket, mind a jövőbeli automatizálási kezdeményezéseket támogatja. A vállalat most már jobban fel van készülve az új robotcellák telepítésére, az intralogisztikai automatizálás kiértékelésére és folyamatos folyamatfejlesztésre. Miközben az MSK a CAD-alapú hegesztési adatokat, fejlettebb mobil robotalkalmazásokat és további automatizált gyártási lépéseket vizsgál, a Visual Components továbbra is támogatni fogja a vállalat hosszú távú célját, amely egy versenyképes, magas fokú automatizáltságú gyártási környezet fenntartása.
